
 ІъЖ·:25
ІъЖ·:25
 БӘПөОТГЗ
БӘПөОТГЗ

№«Лҫ№©УҰ»ъЖчИЛЕдјюј°ЦЬұЯЕдМЧЙиұёЈ¬°ьАЁұҫМеЕдјюЎўҝШЦЖ№сЕдјюЎўКҫҪМЖчј°ПЯАВөИЈ¬Мṩ»ъЖчИЛО¬ұЈәН№ӨТө»ъЖчИЛөД°ІЧ°өчКФЈ¬ИнУІјюЙиұёөДЙэј¶ёДФмЈ¬7*24hИ«МмКЫәу·юОсОӘ№Өі§ЖуТөөДЙъІъұЈјЭ»ӨәҪЈ¬ІўЗТДЬ№»Мṩ¶юКЦ»ъЖчИЛ№әВтәН»ШКХ·юОсЎЈДҝЗ°ОТГЗ·юОс»ъЖчИЛУРABBЎўҝвҝЁЎў°ІҙЁЎў·ўДЗҝЖөИЎЈ
ЎсЕдјюёь»»·юОс
Ўс»ъЖчИЛО¬РЮ
ЎсЙиұё°ІЧ°УлөчКФ
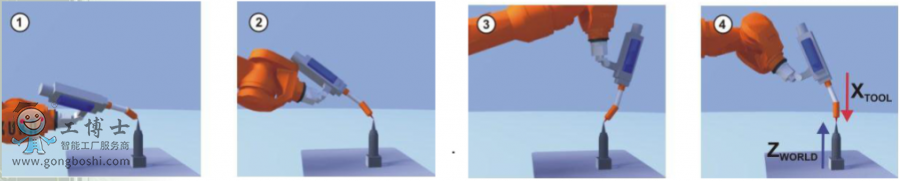
ЎЎЎЎҝвҝЁ»ъЖчИЛTCPРЈХэ
ЎЎЎЎІЩЧчІҪЦи
ЎЎЎЎ1. ФЪЦчІЛөҘЦРСЎФсН¶ИлФЛРР > ІвБҝ > №ӨҫЯ > XYZ 4 өгЎЈ
ЎЎЎЎ2. ОӘҙэІвБҝөД№ӨҫЯёш¶ЁТ»ёцәЕВләНТ»ёцГы іЖЎЈ УГјМРшјьИ·ИПЎЈ
ЎЎЎЎ3. УГ TCP ТЖЦБИОТвТ»ёцІОХХөгЎЈ өг»чІвБҝЎЈ өг»чКЗ»Шҙр°ІИ«СҜОКЎЈ
ЎЎЎЎ4. УГ TCP ҙУТ»ёцЖдЛы·ҪПтіҜІОХХөгТЖ¶ҜЎЈ өг»чІвБҝЎЈ өг»чКЗ»Шҙр°ІИ«СҜОКЎЈ
ЎЎЎЎ5. °СөЪ Јҙ ІҪЦШёҙБҪҙОЎЈ
ЎЎЎЎ6. КдИлёәФШКэҫЭЎЈ ЈЁИз№ыТӘөҘ¶АКдИлёәФШКэҫЭЈ¬ ФтҝЙТФМш№эёГІҪЦиЎЈ Ј©
ЎЎЎЎ7. УГјМРшјьИ·ИПЎЈ
ЎЎЎЎ8. ФЪРиТӘКұЈ¬ ҝЙТФИГІвБҝөгөДЧшұкәНЧЛМ¬ТФФцБҝәНҪЗ¶ИПФКҫЈЁТФ·ЁАјЧшұкПөОӘ»щЧјЈ©ЎЈ ОӘҙЛ°ҙПВІвБҝөгЎЈ И»әуНЁ№эНЛ»Ш·ө»ШөҪЙПТ»ёцКУНјЎЈ
ЎЎЎЎ9. »тХЯЈә өг»чұЈҙжЈ¬ И»әуНЁ№э№ШұХНјұк№ШұХҙ°ҝЪЎЈ
ЎЎЎЎ»тЈә °ҙПВABC 2 өг·Ё»тABC КАҪзЧшұк·ЁЎЈ ЖщҪсОӘЦ№өДКэҫЭұ»ЧФ ¶ҜұЈҙжЈ¬ ІўЗТТ»ёцҝЙТФФЪЖдЦРКдИл№ӨҫЯЧшұкПөЧЛМ¬өДҙ°ҝЪЧФ ¶ҜҙтҝӘЎЈ
ЎЎЎЎБЛҪвёь¶а ҝвҝЁ»ъЖчИЛ
ЎЎЎЎ·ЦПнөҪ:
ЎЎЎЎПВТ»ЖӘЈәҝвҝЁ»ъЖчИЛЧшұкПө
ЎЎЎЎЙПТ»ЖӘЈәҝвҝЁ»ъЖчИЛБгөгРЈХэ
ёь¶аЧКС¶ ҝвҝЁ»ъЖчИЛ

